

实验小组构建了一个基于无人机的水环境激光诱导荧光监测系统。
在固定范围内进行遥感演示测量,并记录了天然河水的荧光特性,无人机在飞行高度10m处采集了浮油和染料标记的自然水量。我们的荧光传感器重量只有1.5kg,由一架商用无人机携带,说明了基于荧光的机载遥感如何仅在目前低光照水平条件下,能够具有成本效益且易于应用。
实验介绍
石油泄漏对海洋生态系统的重大影响引起了全世界的关注。海上钻井平台和船舶事故是溢油的主要来源[1]。石油是由环烷烃、烷烃和芳香烃组成的富烃聚合物混合物,具有非常复杂的物理化学性质。在石油泄漏的最初几天,石油浮在水面上。然后在物理输送、溶解、乳化、氧化和降解的作用下,其组分发生变化。快速、可靠的溢油检测与识别对海洋溢油控制至关重要,遥感技术为溢油检测的发展做出了重要贡献[2,3]。有几个可用的测量方法,例如红外/紫外线传感器和雷达系统,已经被证明能够在飞机上检测溢油。此外,还引进了MODIS和MERIS卫星等太空设备,实现了溢油检测,并具有厚度测量能力[4]。油液快速可靠的检测和识别是海洋溢油控制的关键,遥感技术为溢油检测的发展做出了重要的贡献[2,3]。几种现有的测量方法,例如IR/UV传感器和雷达系统,已被证明能够在飞机上操作时检测漏油。此外,还引进了MODIS和MERIS卫星等太空设备,并启用了溢油探测,并具有厚度测量能力[4]。
激光诱导荧光(LIF)技术为环境监测提供了一种新的、更为强大的技术手段。可以利用藻类和石油泄漏的荧光特征来研究水体。在[5-8]中介绍和回顾了一些早期的工作,随后的事态发展在[9-14]中得到例证。使用LIF技术的EMETE传感仪器主要采用波长在308至355nm之间的脉冲激光源进行激发,这种仪器也可用于植被监测(参见15]),并且在文化遗产领域也有应用(参见[16])。激光诱导荧光法利用特定的光谱特征,提供了识别不同类型的释放油和研究风化等作用的影响的可能性[17-20]。
现有的油液检测方法主要是为机载或星载应用设计的。被动成像相机严重依赖于日光条件。现有的基于激光的机载荧光监测系统比较复杂,且要求较高。尽管一个单独的机载激光雷达系统可以应用在相当大的范围内[14],但它体积庞大,不易操作。这在很大程度上与通常使用脉冲激光的事实有关,导致系统沉重而昂贵,即使根据[20]中的分析,适用于无人机(UAV)运行的最新轻量化解决方案现在看来是可行的。
利用荧光进行的石油污染遥感几乎完全是利用脉冲激光系统进行的,因此,使用门控和增强型探测器可以方便地抑制背景辐射。随着基于半导体材料[21]的连续波蓝光和紫外激光器的发展,我们有可能制造出简单的荧光传感器,首先用于实验室研究[22],然后用于遥感荧光应用[23]。基于连续波激光的非弹性高光谱激光雷达系统识别石油污染,在实验室[24]中使用了一个类似于先前用于对水中藻类和浮游动物进行距离分辨监测的系统[25]。我们在这里报告关于一个功能齐全、结构紧凑、成本低廉的激光诱导荧光系统的构筑,该系统由现成的商用无人机操作。我们最近描述了一个基于无人机的、具有距离分辨能力的高光谱连续波激光雷达系统,并展示了树木的荧光高度剖面图[26]。携带激光雷达系统的无人机已被广泛使用,也有商业用途,如[26]所述,但似乎仅适用于弹性后向散射地形和城市剖面。由于表面监测(例如水面上的油)不需要测距,因此光学系统可以调整到合适的固定飞行高度,荧光监测系统可以变得更简单、重量更轻。
下面,我们将介绍使用这种新型荧光传感器进行的初步实验室测试,它被部署在跨河大桥上,使用无人机对自然水域和污染物的进行空中监测。
仪器说明
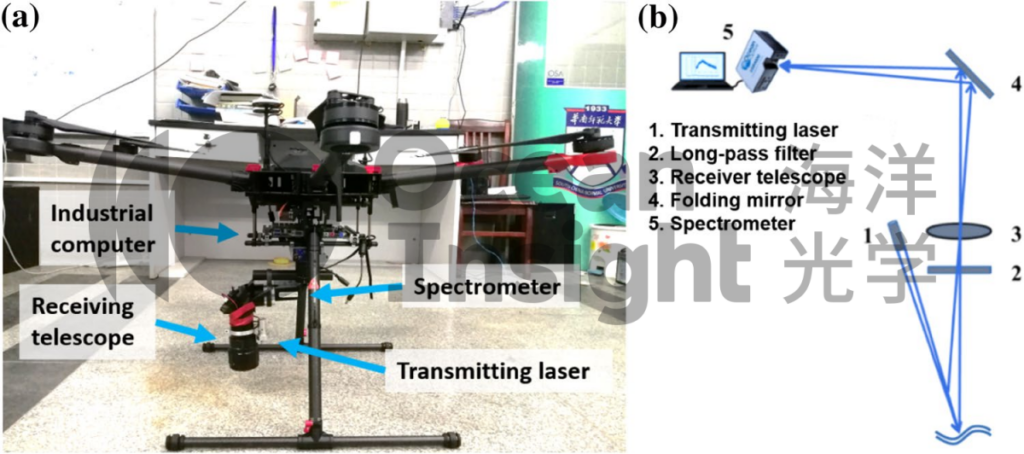
图1a 显示了与无人机集成的系统。利用工业计算机进行系统控制和数据存储。图1b为激光诱导荧光系统示意图。
利用海洋光学USB4000小型光谱仪对光谱信号进行连续检测。光谱仪操作的狭缝宽度为200μm,光谱分辨率为10nm。利用标准钨光源校准光谱检测响应。无人机配备了用于无人机推进和LIF系统运行的电池,并允许25分钟的连续检测。荧光传感器的总重量为1.5kg。
测量方法
固定范围测试测量
首先,我们从三楼的窗户向下,在11米固定的传感器-目标分离距离下测试了我们的荧光传感器系统。如图2a所示,该系统垂直俯视位于楼下地面的水桶。直径为53cm的水桶中装满90cm深的自来水。然后,我们研究了添加碳氢油时光谱的变化。原油和船用柴油是海洋环境中最相关的油品。然而,出于实际的原因,我们在试验中使用了机油。我们研究了不同油脂的荧光特性,如我们的早期工作,参见[8]。
在不搅动水的情况下加15次机油,使浮油层越来越厚。每次往桶里倒入40毫升纯油。然后,总含量从0到520毫升,相应的层最终达到2.4毫米的厚度。适当设置分光计的曝光时间,平均每个光谱记录15次。0-320毫升的时间为1s。为了避免过度曝光,将360到520毫升的曝光时间设置为0.5s。最后,在曝光时间设置为0.3s的情况下对纯油进行测量。对于列出的曝光时间,测试测量的结果如图2b所示。
在没有油的情况下记录的光谱(下方蓝色曲线)对应于水的自然背景荧光,归因于溶解的有机物(DOM),峰值接近500nm。此外,在480nm激励下,我们观察到与H2O水分子的O-H伸缩振动相对应的激光诱导拉曼峰,其斯托克斯位移约为3350/cm。在440nm处出现较宽的峰值是由用来截断412nm强激发激光的长通滤波器的固有荧光引起的。在随后的现场测量中,滤波器被移除,因此产生了这种杂散信号。
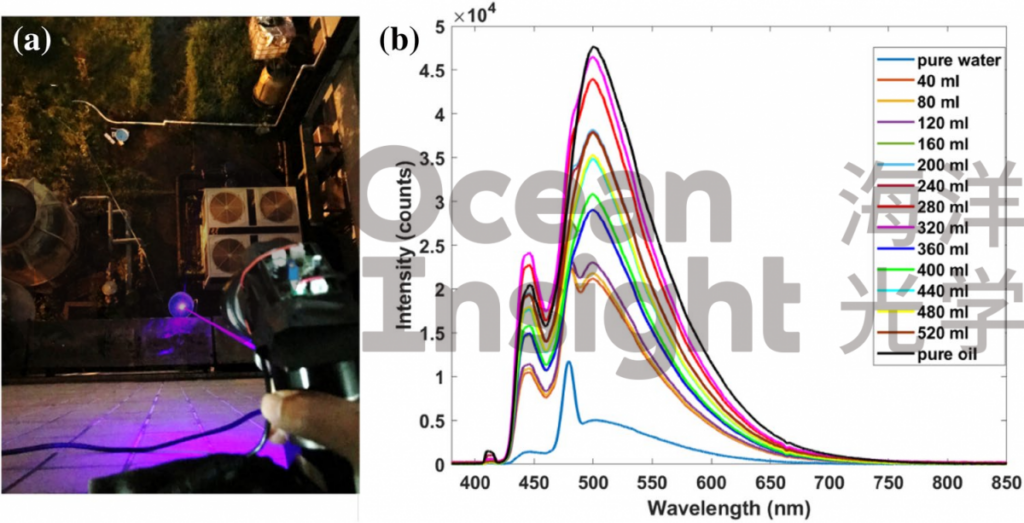
对于0–320毫升的记录,曝光时间为1.0s,但对于360–520毫升的曲线,曝光时间减少到0.5s,最后将纯油设置为0.3s
从光谱曲线上可以观察到机油的特性和荧光峰的增加,在500nm左右再次达到峰值。它叠加在宽的DOM荧光分布上。随着油量的增加,水拉曼峰变小,在强烈的油荧光的作用下难以分辨。这是因为412nm辐射的吸油作用,阻止了光线到达水下。同时,油的荧光增强,并很快强烈地控制了DOM荧光。为了显示光谱的发展,形成F500和F480强度之间的比率,如图3b所示。从光谱中提取的油荧光峰强度如图3c所示,水拉曼峰强度如图3d所示。
记录数据的处理方法如图3a所示。C(F500)是500 nm处的油荧光。A(F480)为480nm处的荧光强度,B为独立的水拉曼信号。在图3b中观察到F500和F480之间的增加比率,其中在单独的试验中测量了10 ml和20 ml数据点。随着更多的油的加入,这个比例会饱和。在评估油荧光时,如图3c所示,直接使用500 nm处的荧光强度,由于较厚的层对DOM的作用很微弱,所以直接使用了500 nm处的荧光强度。为了从我们的测量结果中得到绝对的(独立的)水拉曼峰强度,首先,我们将水拉曼带(470-490 nm)的强度值设置为零。然后我们采用插值的方法将曲线拟合到非拉曼部分的合成光谱中,同时考虑滤波后的荧光,实现了背景光谱。然后,从测量光谱中减去所得到的背景光谱,得到绝对拉曼峰。结果如图3d所示。为了补偿不同的曝光时间以使得所有的东西都在同一尺度上,光谱强度被归一化为2.1节开头所述的不同曝光时间。我们注意到,即使对于相对较厚的油膜,油的荧光仍会增强,并且仍然存在剩余的水拉曼信号,这反映了油在412nm波长处吸收相对较低的事实。这些曲线有一些不规则之处,很可能是由于超过三层楼的实验装置可能不稳定。
基于桥梁的河水测量
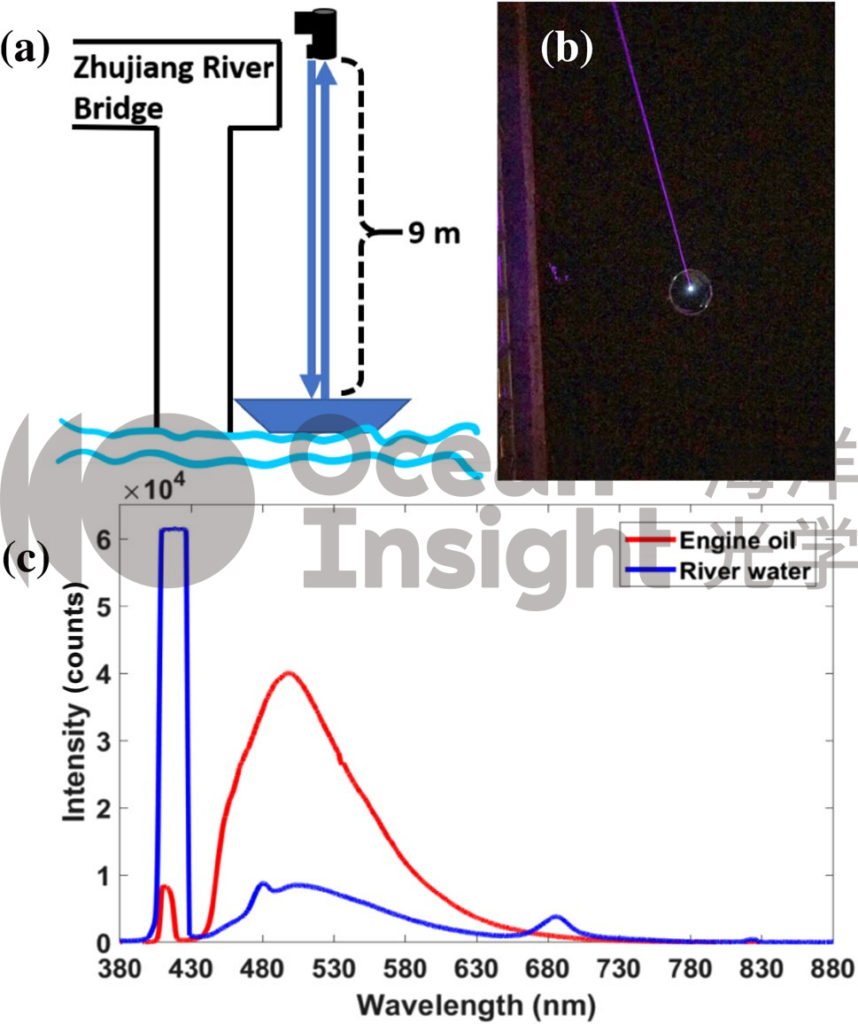
我们在广州珠江大桥上用荧光传感器进行了测量,以获得更真实的情况。探测距离为9m,在曝光时间为0.5s的条件下,测量了天然珠江水和一个装满纯油的浅浮筒,容器直径为90cm,高度为25cm。在容器的底部,放了一块黑布。与所有后续的登记中一样,测量结果是在没有阻挡有色玻璃滤光片的情况下获得的,测量结果如图4所示。
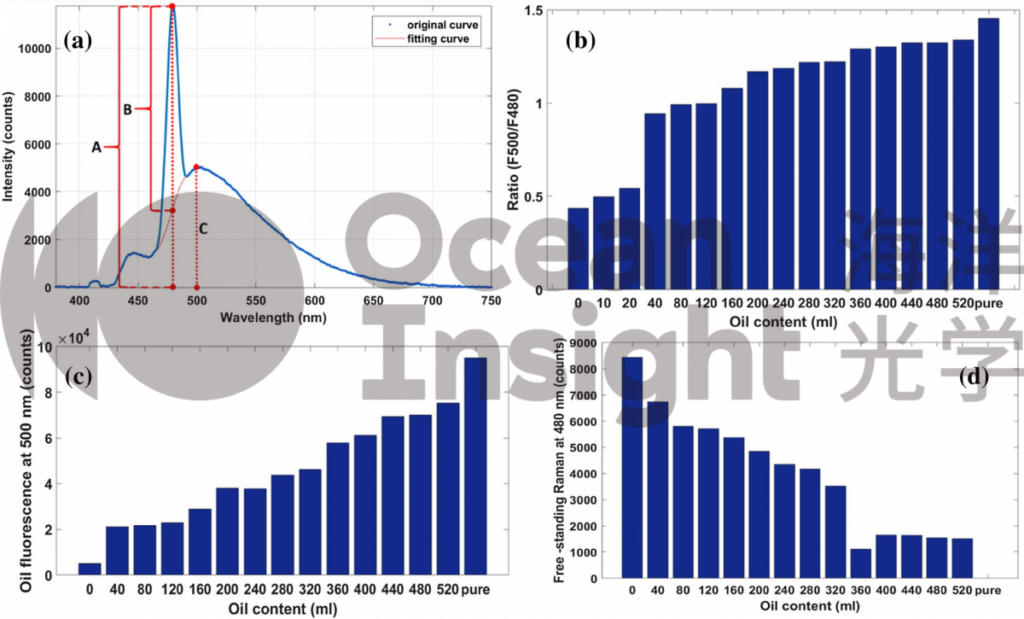
图4a为桥基布置示意图,图4b为激光束照射河面的照片。图4c为荧光传感器记录的光谱。由于富营养化水体中含有丰富的微藻,天然河流深水荧光显示出强烈的DOM信号,并在680nm左右出现明显的叶绿素峰值。在480nm处观察到由412nm激光诱导的水拉曼峰,由于探测到的水体积相同,提供了方便的校准,这使得我们可以观察到,河水的DOM信号强度是广州自来水的6倍左右,其光谱如图2b所示。将浮油容器置于荧光传感器激光束下,其宽带荧光增强约5倍,拉曼和藻类信号如预期般消失。值得注意的是,在开放的海洋环境中,随着DOM信号的降低,与溢油的对比明显增强,可以通过选择一个优化的、相当低的激发波长进一步增强,其中石油有更强的吸收。
基于无人机的河水测量
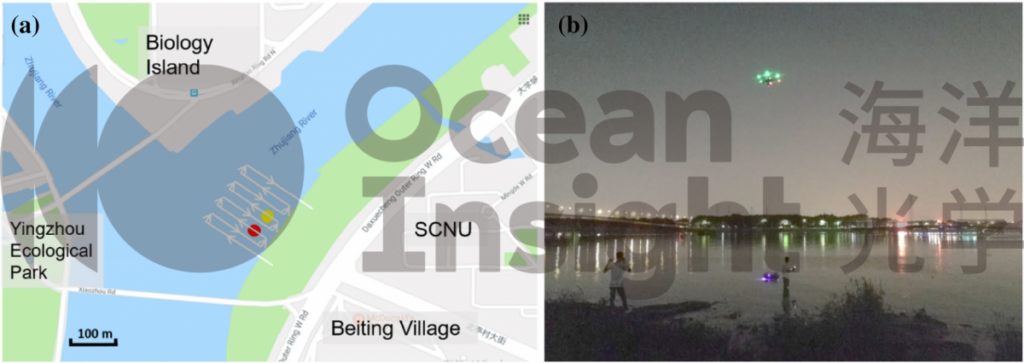
基于无人机的测量在珠江上空进行,在无人机下方安装了荧光传感器。曝光时间设置为0.5s。为了避免污染河流,我们再次将两个浮式容器固定在河流表面,如图5a所示。黄色斑点标记的是装满1L纯油的容器,导致典型的层厚为1 – 2毫米。红点表示另一个装满10升浓度为0.03 g/l的罗丹明610染料稀溶液的容器。染料溶解在天然珠江水中,所得层厚为1-2厘米。飞行路线设置为四次往返,飞行面积10m×20m(长×宽),无人机平均飞行速度约3 km/h。测量场景如图5b所示。
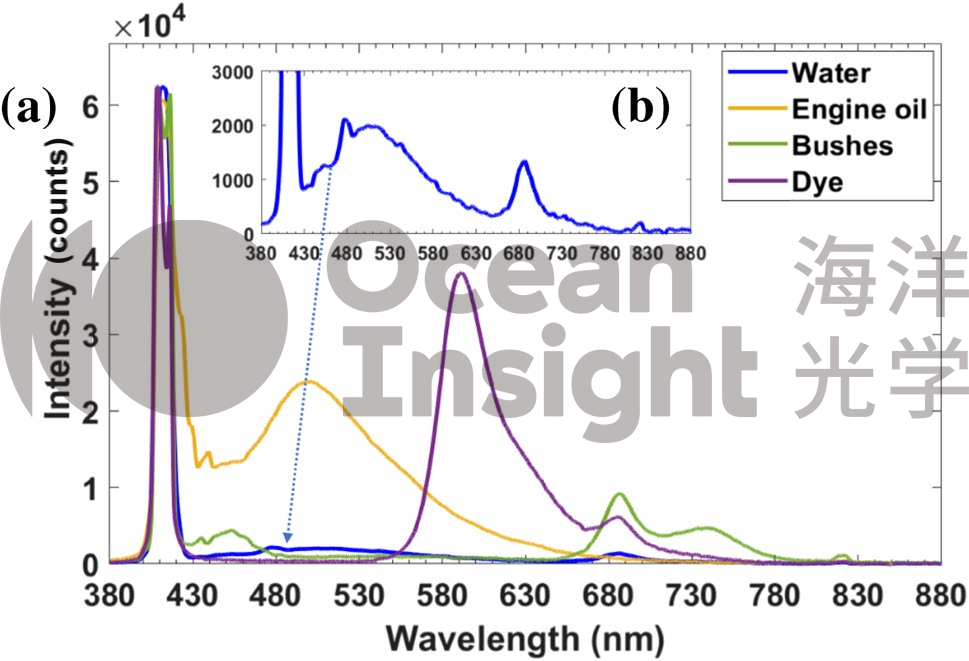
测量结果如图6a中的四个典型光谱所示。在两个浮式容器上的测量中观察到500 nm处的油荧光和580 nm处的染料特征峰。无人机扫描还覆盖了河边的灌木丛,记录到685nm和745nm处的强叶绿素峰,这是陆地植被的特征。自然珠江深水LIF光谱在图6b中扩大,水拉曼峰为480nm。水体中的DOM荧光和藻类叶绿素信号突出出现,如图4b所示,与水拉曼峰上归一化类似。
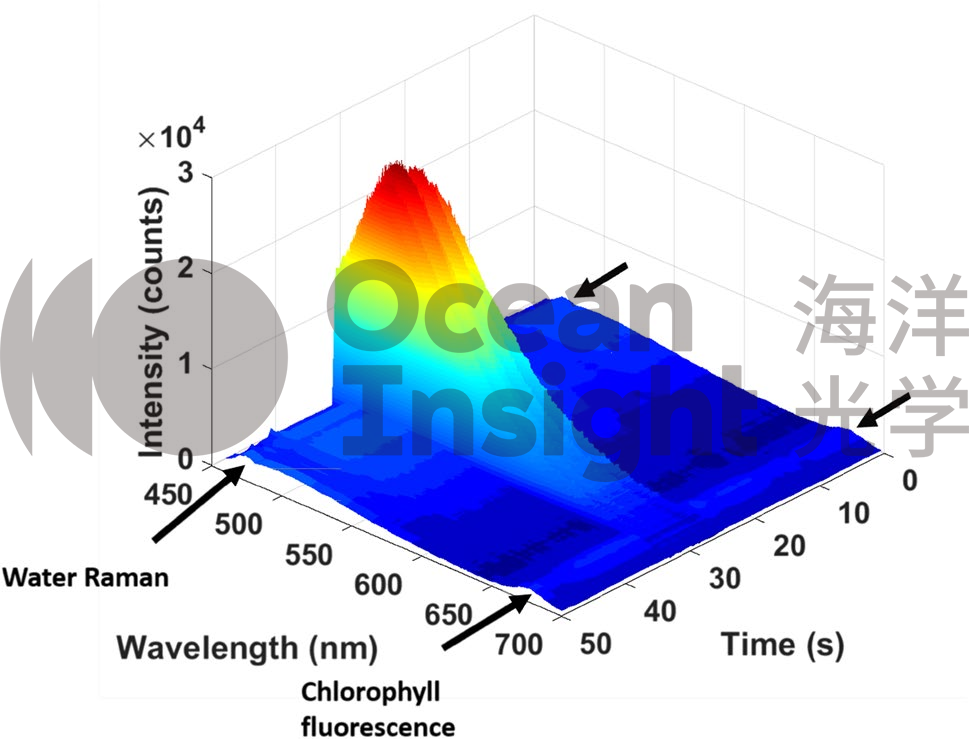
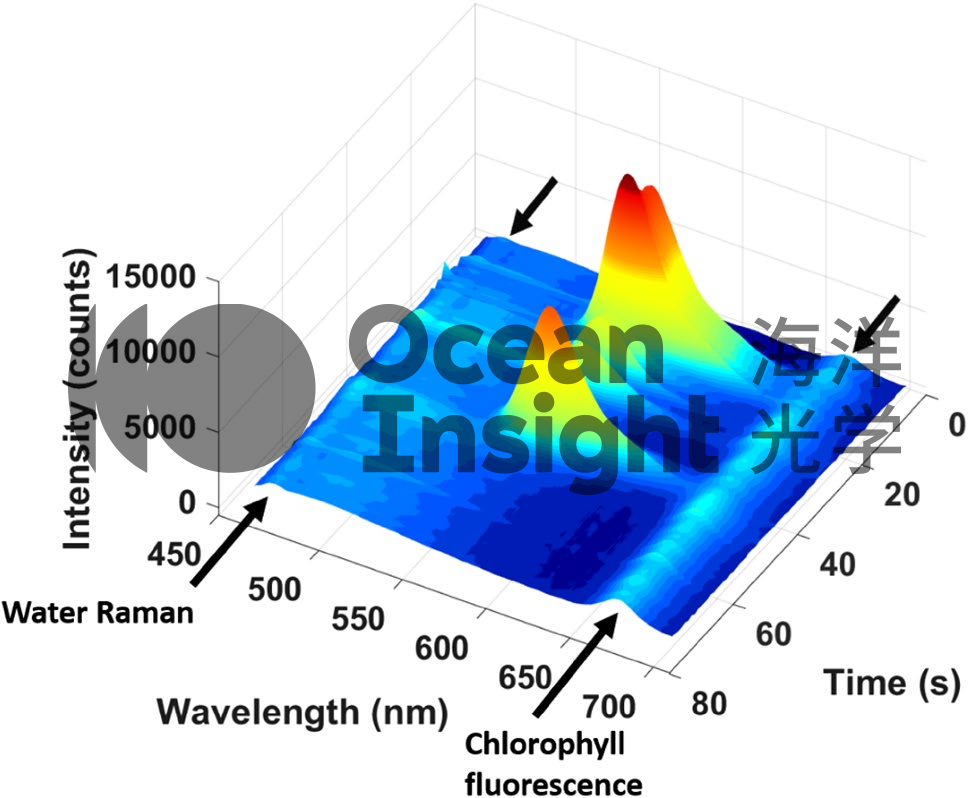
图7显示了无人机在珠江充油集装箱上空飞行的慢速线性扫描结果。持续时间为50s,每次记录的曝光时间为0.5s。我们注意到,与周围的水叶绿素信号相比,油荧光信号非常显著(当油信号消失时出现)。
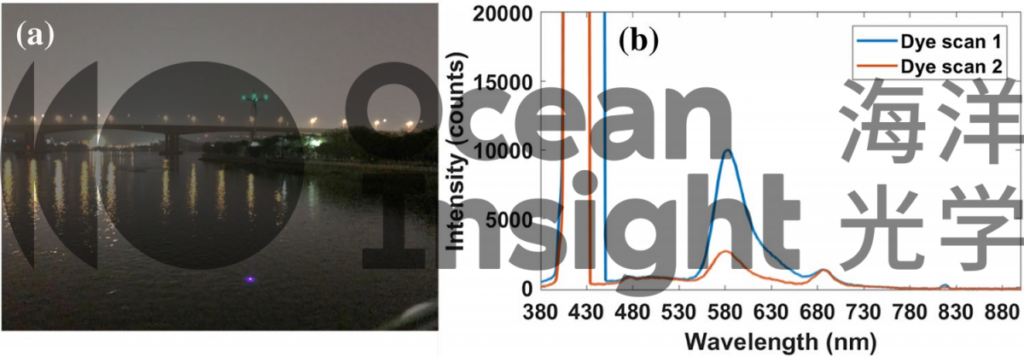
在进一步的测量中,我们监测了染料的局部释放扩散到珠江的地表水。一桶罗达明610染料浓度为0.03 g/L的4.5L水从桥上倒入珠江,同时无人机在下游盘旋,荧光传感器不断记录。光谱仪的曝光时间设为0.5 s。无人机在距离染料注入点10 m和5 m的高度飞行,如图8a所示。图8b显示了来自测量序列的光谱记录示例。
图9显示了一个完整的基于无人机的珠江水的时间记录,同时一桶含染料的水(0.03 g/l)以类似的方式倒入江中。时间持续约80s,光谱仪的曝光时间为0.5s,将图9中的染料信号与图6a中的染料信号进行比较,与典型的询问层厚度进行标度,并对合理稳定的河藻荧光进行归一化处理,得到10μg/L左右的灵敏度,如果选择一个能更好地重叠染料吸收谱的激发波长,可以使其提高一个数量级。
我们描述了一种体积小、重量轻的荧光传感器,它提供了高质量的浅水水层荧光光谱,具有来自石油、溶解有机物(DOM)、藻类等的光谱特征,并允许使用水拉曼信号进行内部校准[27,28]。整个系统的重量只有1.5kg,使用高功率连续波半导体激光器和小型数字光谱仪就可以实现。
该系统与一艘小型无人机航母集成。为了获得无人机飞越水面上方几米处的测距光谱,如我们最近的论文[26]中对植被监测所述,基于Scheimpflug原理的CW激光雷达系统可用于水生应用,在水生应用中存在许多挑战,例如水生动物[29]。然而,对于水上石油的研究和染料弥散的水文研究[30],本文所描述的小型系统提供了传统脉冲激光荧光传感器和连续激光Scheimpflug系统的良好替代,并且在性能和简单方面具有一定的优势。
如果连续波半导体激光器工作在400nm以下,就可以实现眼睛安全系统。当前版本的荧光传感器系统只能在夜间使用,这与带范围选通、允许在白天使用、同时在低环境光照条件下仍能更好地工作的脉冲激光雷达系统相比,是一个明显的缺点。利用足够高的连续波功率,并结合合适的调制方案进行背景减除,日光操作应该是可行的,大大扩展了现有的能力。显然,有限的射程和飞行时间限制了大面积的监视。然而我们的研究表明,机载荧光成像的成本可以显著降低,使得基于无人机的远程LIF技术成为一种可行的诊断选择,特别是在有限区域的研究中。
本文摘自:
Zheng Duan, Ying Li, Jinlei Wang,等. Aquatic environment monitoring using a drone-based fluorosensor[J]. Applied Physics B, 2019, 125(6).
参考文章:
| S.E. Chang, J. Stone, K. Demes, M.Piscitelli, Consequences of oil spills: a review and framework for informingplanning. Ecol. Soci. 19, 26 (2014)R. Goodman, Overview and future trendsin oil spill remote sensing. Spill Sci. Technol. Bull. 1, 11 (1994)M. Fingas, C.E. Brown, Chap. 6. Oilspill remote sensing: a review, in Spill science and technology, ed. by M.Fingas (Gulf Professional Publishing, Boston, 1990)A. Pisano, F. Bignami, R. Santoleri, Oil spill detection inglintcontaminated near-infrared MODIS imagery. Remote Sens. 7,1112 (2015)X. Wang, Z. Duan, M. Brydegaard, S.Svanberg, G.Y. Zhao, Drone-based area scanning of vegetation fluorescenceheight profiles using a miniaturized hyperspectral lidar system. Appl. Phys. B124, 207 (2018). (APHB-D-18-00319)M. Brydegaard, S. Svanberg, Photonicmonitoring of atmospheric and aquatic fauna. Lasers Photon. Rev. 12, 1800135 (2018) |